

WPI Innovation Studio
During an experimental course at WPI our team was given a super open ended project to build whatever we want using the prototyping lab that is available to us. After selling the VR Glove idea to my team of five we hand about three weeks to rapidly prototype the design.
Inspiration – Lucid VR
We took great inspiration for Lucas from Lucid VR as he had come up with the idea of using badge reals to track fingers in a glove. Thanks to his low budget approach and his open-source drivers we were able to quicky iterate upon his design and engineer a force feedback glove using sprockets and solenoids.
Our implementation
We redesigned the badge reel housing and laser cut an acrylic sprocket to attach to it. We attached a solenoid to be used as a locking bar that would fire when the finger needed to stop. The sprocket would catch the solenoid head while the finger was applying pressure, so we only had to power the solenoid once rather than leaving it on.
Assembling the rest of the pieces took a few printings in order to find the right tolerances for the housing.
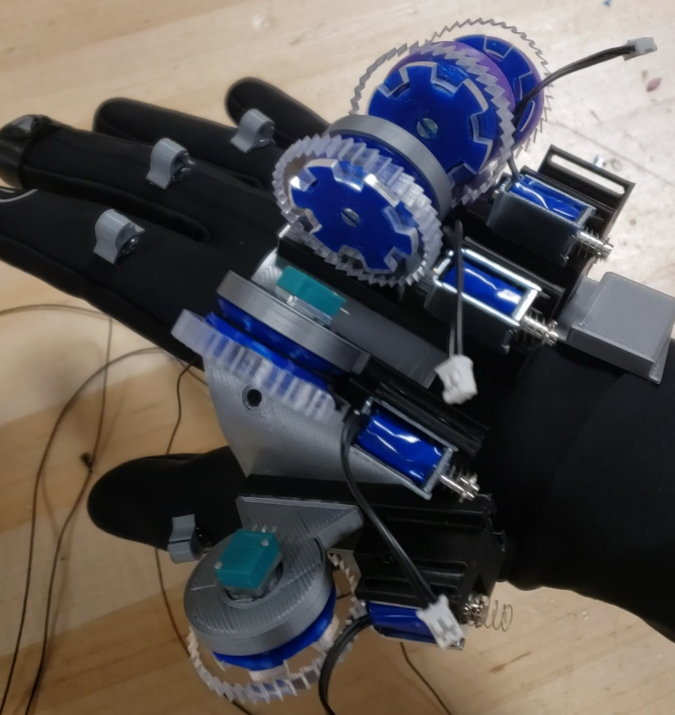
With about five days left we did not have time to make a PCB so the wiring looks a bit crazy. I also programmed the Arduino with a force feedback piano as a failsafe if we did not get the VR side working in time.
Using divers from Lucid VR helped dramatically as we were able to get the glove working inside of Steam VR with the badge reals without too much trouble. Additionally Lucid VR had already been experimenting with servos to apply force feedback, so refactoring the code to work with solenoids instead turned out to work great!
Whats Next?
With such a short time period there is a lot left to explore. The team is continuing the project through the next academic year. As graduate I will be present to advise their progress and I can’t wait to see where it goes!